


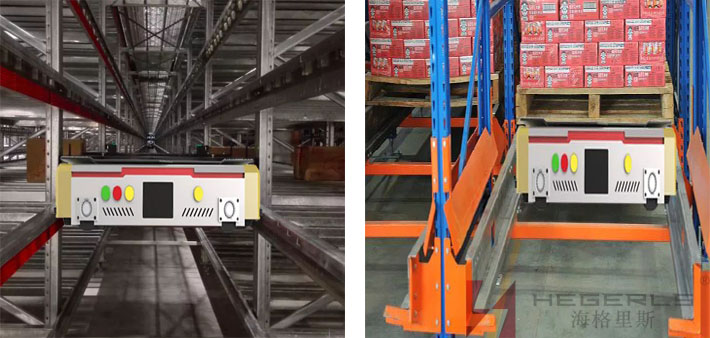
Sa bag-ohay nga mga tuig, sa padayon nga pagkapopular sa Internet, ang e-commerce paspas nga milambo. Ang mga palaliton sa pag-order sa mga kustomer nagpakita sa mga kinaiya sa daghang mga lahi, pipila ka mga batch ug mubo nga panahon sa paghatud, nga naghimo sa densidad sa pagtipig sa mga estante sa sentro sa pag-apod-apod sa logistik sa supplier nga padayon nga molambo. Ang kasubsob sa pagsulod ug paggawas sa mga materyales sa bodega nagkadaghan. Ang gidaghanon sa gagmay nga mga bahin nga nanguha kada adlaw nagkadaghan. Nagkadaghan nga mga sentro sa pag-apod-apod sa logistik ang naggamit sa shuttle nga mga butang nga nakabase sa mga butang sa sistema sa pagpili sa mga tawo.
HEGERLS (Hebei Walker Metal Products Co., Ltd.
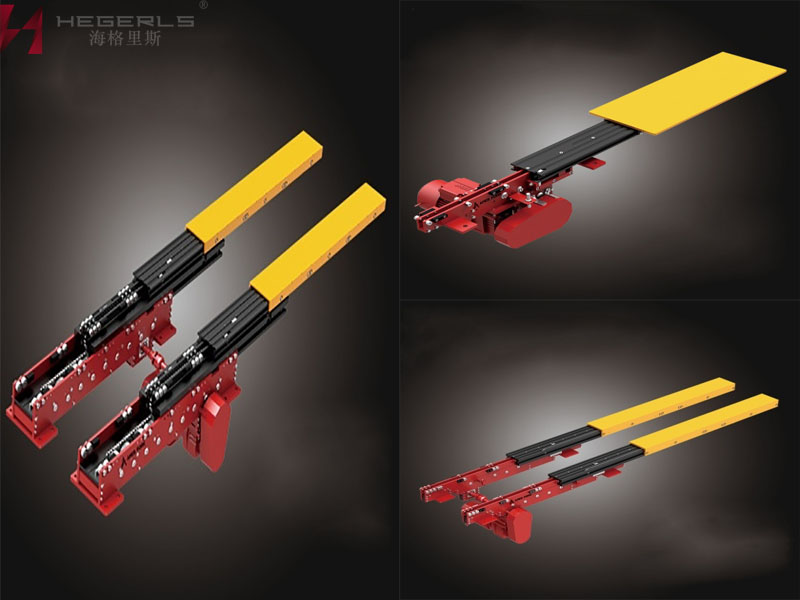
Ang clamping telescopic forks kay kaylap nga gigamit sa automatic storage equipment sama sa stereo warehouse multi-layer shuttle cars, shelf type bins AGV, RGV, ug mini load. Ang pinakataas nga gibug-aton sa materyal nga kahon nga gihuptan sa HEGERLS mahimong moabot sa 50Kg. Ang clamping width sa fork arm mahimong i-adjust nga arbitraryo sulod sa range nga 200 ~ 600mm. Ang labing kadaghan nga pagbiyahe sa pagpili mao ang 840mm. Ang kinatas-an nga operating speed sa teleskopiko nga tinidor mao ang 1.5m/s, ug ang acceleration mao ang 1.2m/s ²。 Ang operating kasaba kay kontrolado sulod sa 75dB, nga makatubag sa mga kinahanglanon sa kadaghanan sa single ug double extension racks. Ang HEGERLS mahimo usab nga ipasadya ang multi-layer shuttle car stereoscopic bodega sa gripping telescopic fork box sumala sa piho nga mga kinahanglanon sa mga kustomer, sama sa gripping width, picking stroke ug uban pang mga parameter.
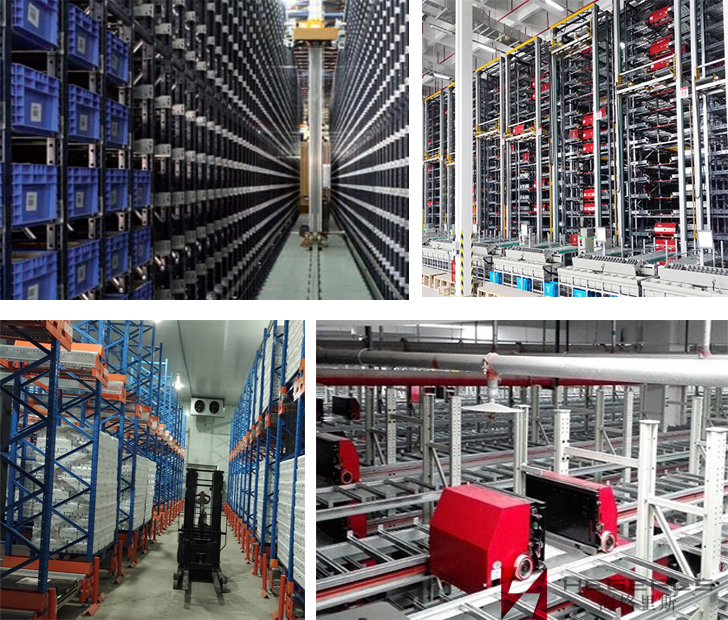
Ang mga bahin sa Hiygris HEGERLS nagkupot sa telescopic fork box nga multi-layer shuttle car stereo bodega Ang telescopic fork usa ka teleskopiko nga mekanismo nga gigamit sa stereo bodega ug ang logistics automatic storage system alang sa materyal nga pagtipig o pagbalhin. Kini adunay flexible two-way automatic expansion function ug tukma nga limit function! Mahimo kini nga direkta nga i-mount sa stacker, o i-mount sa usa ka fixed lifting mechanism, o i-mount sa usa ka mobile lifting platform. Ang stacker nagdagan sa agianan tali sa mga istante aron awtomatiko nga ma-access o ibalhin ang mga butang! Mahimo kini nga konektado sa sistema sa linya sa produksiyon ug sistema sa pagdumala sa negosyo. Gigamit niini ang teknolohiya sa kompyuter ug barcode (encoder) aron matuman ang intelihenteng pagdumala ug operasyon sa impormasyon!

Mahitungod sa HEGERLS Clamping Telescopic Fork
Ang HEGERLS telescopic gripper fork usa ka talagsaon nga klase sa fork sa serye sa telescopic forks sa mga stacker, nga mao, usa ka two-way automatic telescopic gripper fork, nailhan usab nga holding gripper fork o holding gripper fork, fork fork o fork fork. . Kini usa ka tinidor nga espesyal nga gigamit alang sa pagbalhin sa gagmay nga mga basurahan. Mahimo kini nga direkta nga tipunon sa usa ka multi-storey picking AGV o uban pang mga working platform, uban ang pagpalapad sa fork arm ug ang clutch sa lever (hook), Kompletoha ang access o pagbalhin nga aksyon!
Ang HEGERLS gripper fork kasagaran ginama sa aluminum alloy, nga adunay gamay nga gidak-on, gaan nga gibug-aton, paspas nga pagdagan ug hapsay nga pagpalapad. Sa parehas nga oras, gisagop usab niini ang prinsipyo sa pag-synchronize sa multi motor, nahibal-an nga ang parehas nga mekanismo sa teleskopiko nga tinidor mahimong magamit sa pagbalhin o pag-access sa mga kahon sa lainlaing mga detalye. Dili lamang kini epektibo nga nagpauswag sa kahusayan sa pagtipig, apan labi usab nga nagpauswag sa rate sa paggamit sa wanang sa pagtipig, labi na alang sa taas nga taas nga intensive Intelligent warehousing!
HEGERLS clip sa teleskopiko nga fork structure
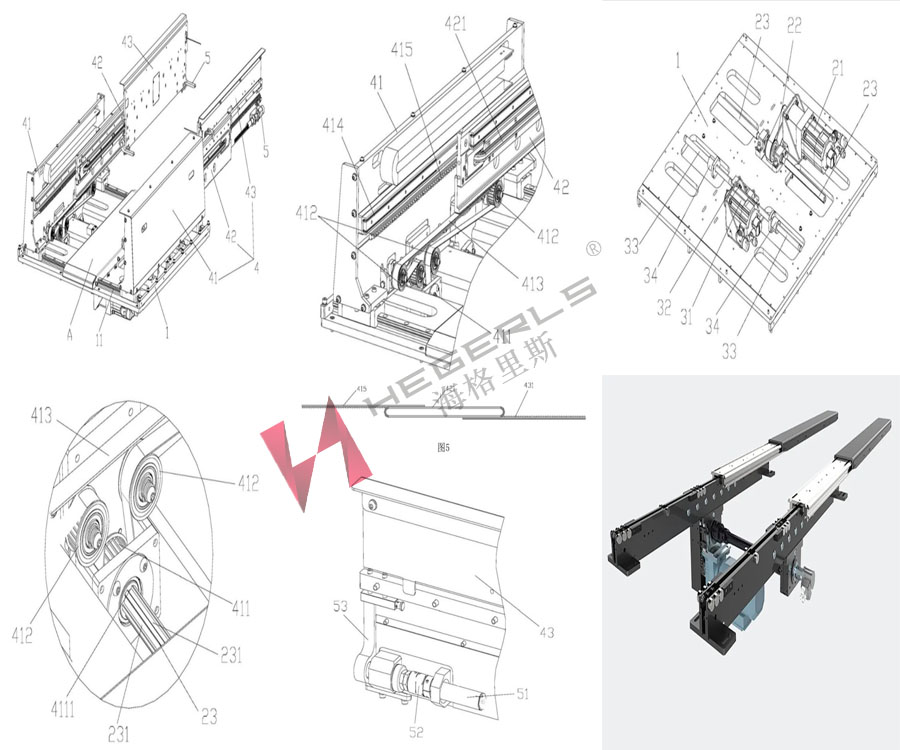
Ang istruktura sa HEGERLS gripper fork mahimong bahinon sa lawom nga lokasyon sa pagtipig ug mabaw nga lokasyon sa pagtipig. Ang lawom nga lokasyon sa pagtipig usa ka lokasyon sa pagtipig nga adunay duha ka materyal nga kahon, ug ang mabaw nga lokasyon sa pagtipig usa ka lokasyon sa pagtipig nga adunay usa ka kahon nga materyal. Kana mao, ang usa ka lawom nga lokasyon sa pagtipig mahimo’g mag-clamp sa duha ka materyal nga mga kahon sa usa ka higayon, samtang ang usa ka mabaw nga lokasyon sa pagtipig mahimo ra nga mag-clamp sa usa ka materyal nga kahon matag higayon. Ang kalainan tali sa HEGERLS gripper fork ug sa ordinaryo nga duplex telescopic fork mao nga ang finger pulling fork gilangkuban gihapon sa tulo ka fork body, nga mao, ang sulod nga fork body, ang middle fork body ug ang gawas nga fork body, gawas nga ang front fork body. adunay usa pa ka pull rod (hook), nga gipares sa guide rail (slide rail), roller bar, synchronous wheel, synchronous belt, fluent bar, shift rod (hook), jacking shaft, wheel bar, drive motor (servo) , shift rod motor Ang instrumento sa pag-ila ug uban pang mga sangkap nagporma sa usa ka kompleto nga mekanismo sa teleskopiko, nga nag-cooperate sa teleskopiko nga fork arm ug ang clutch sa lever (hook) aron makompleto ang pag-access o pagbalhin nga aksyon!
Prinsipyo sa pagtrabaho sa HEGERLS clip sa teleskopiko nga tinidor
Ang fork arm sa HEGERLS gripper fork kay nagbarog sa kilid ug gisumpay sa kilid pinaagi sa guide rail. Pinaagi sa pagkontrol, ang riles sa giya mahimong mag-slide pabalik-balik aron ma-adjust ang distansya tali sa duha nga mga bukton sa tinidor sa tinidor, aron makab-ot ang sagad nga paggamit sa usa ka tinidor alang sa daghang mga detalye nga mga kahon sa materyal! Kung nagpunit sa mga materyales, ang tinidor moabot sa posisyon sa pagtipig sa materyal, ang retaining hook (lever) awtomatikong ipaubos ug gibabagan ang katapusan nga nawong sa karton o plastik nga kahon, ug dayon ang tinidor nag-atras, giguyod ang karton o plastik nga kahon sa tunga-tunga sa ang tinidor, ug dayon molihok nga balit-ad sumala sa mga kinahanglanon sa degree, ang kaw-it (lever) gibira balik, ug ang tinidor moatras pag-usab aron makompleto ang buluhaton sa pagkuha o pagbalhin! Bisan kung ang prinsipyo sa gripper fork parehas sa ordinaryo nga telescopic fork, ang transmission parts, connecting rods ug uban pang component sa finger fork lahi kaayo. Gigamit kini sa paghulagway nga ang chain wheel, chain, gear, rack, ug uban pa tanan gipulihan sa synchronous wheels, synchronous belts, ug uban pa, samtang ang sliding arm naggamit ug guide rail, ug ang fork body nga materyales kay gipulihan sa metal sheets. o aluminum alloy nga mga materyales, mao nga ang gibug-aton sa gripper fork kay mga 80kg ra.
Dugang pa, kinahanglan nga matikdan nga sa panahon sa disenyo sa gripper type telescopic fork, ang gidak-on sa dasok nga mga istante sa pagtipig, ang bertikal nga posisyon sa mga istante nga adunay mga kahon, ang lebel sa track ug ang gidak-on sa mga kahon kinahanglan nga gihiusa aron mahibal-an ang kinatibuk-ang mga parameter sa extension forks (extension fork movement, box spacing, fork width, fork internal width, fork height, ug uban pa), aron matubag ang mga panginahanglan sa mga sudlanan sa mga shelves. Ang clamping fork mahimo ra mabalhin o ma-access ang mga produkto nga giputos sa mga karton o plastik nga mga kahon nga epektibo, ug dili makabalhin sa dili regular nga mga materyales. Dugang pa, ang gidaghanon ug gibug-aton sa gibalhin nga kahon sa materyal kinahanglan dili kaayo dako, ug ang gibug-aton sa karga dili molapas sa 100KG! Ang gitas-on sa clamping fork kasagaran gidisenyo sumala sa gitas-on sa bin!
Mahitungod sa HEGERLS Clip sa Shuttle
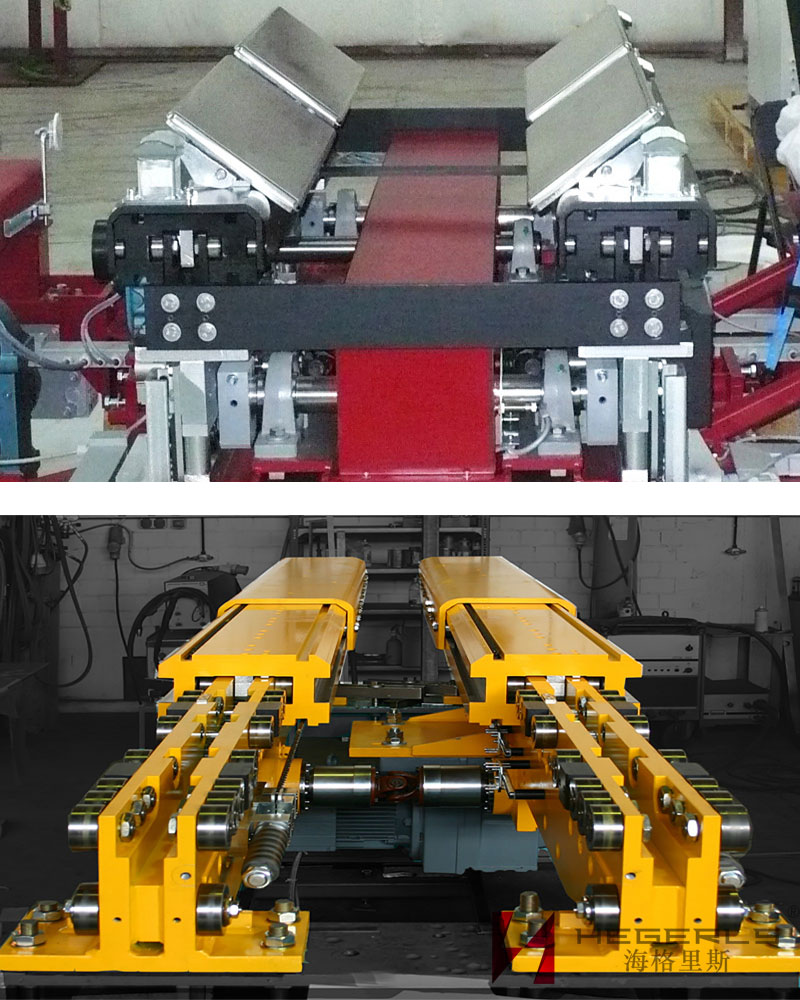
Ang istruktura sa HEGERLS clip sa shuttle naglangkob sa shuttle frame, shuttle chassis, traveling mechanism, secondary fork extension mechanism, collector, bearing plate ug bearing platform. Ang istruktura mao ang mosunod:
Ang bisan unsang shuttle frame kasagaran usa ka closed cavity nga gilangkuban sa mga nag-unang body bracket sa duha ka kilid, ang shell ug ang sulod nga hub bracket, ug gihikay sa duha ka tumoy sa shuttle chassis; Ang kabhang gihatag sa usa ka ibabaw nga hapin nga mahimong maablihan ug sirado pinaagi sa usa ka turnover nga bisagra sa pultahan; Ang usa ka panel wire rack gihan-ay sa ibabaw sa hub bracket; Ang mekanismo sa pagbiyahe naglangkob sa usa ka ligid sa pagmaneho, usa ka passive wheel, usa ka DC brushless motor, usa ka reducer ug usa ka connecting shaft; Ang duha ka kilid sa shuttle frame sa usa ka tumoy sa shuttle chassis gihatagan og driving wheels nga konektado pinaagi sa connecting shafts, ug ang duha ka kilid sa shuttle frame sa pikas tumoy sa shuttle chassis gihatagan og passive wheels nga konektado pinaagi sa connecting shafts; Ang DC brushless motor nakigtambayayong sa reducer sa pagmaneho sa nagmaneho nga ligid ug sa pagpadagan sa passive ligid; Ang connecting shaft gihatagan og magnetic encoder, diin ang mga posisyon sa pagsugod ug paghunong sa shuttle sa tul-id nga track makuha; Usa ka mekanismo sa pagpalapad sa sekondaryang tinidor ang simetriko nga gihan-ay sa sulod nga bahin sa frame sa shuttle nga sakyanan; Ang shuttle chassis tali sa mga mekanismo sa pagpalapad sa sekondarya sa fork gihatag sa usa ka plataporma nga nagdala alang sa pagbutang sa basket nga kargamento; Ang closed cavity sa shuttle car frame matag usa gihatagan og usa ka bearing plate, diin ang usa ka driving plate, usa ka main control plate sa mekanismo sa pagbiyahe ug usa ka main control plate sa fork extension mechanism nga sunodsunod nga gihan-ay; Ang driving plate maoy nagmaneho sa mekanismo sa pagbiyahe aron sa pagpadagan sa shuttle nga modagan sa tul-id nga track. Ang nag-unang control board sa mekanismo sa pagbiyahe nagkontrolar sa running parameters ug magsugod sa stop positions sa shuttle, ug ang main control board sa fork extension mechanism nagkontrolar sa secondary fork extension mechanism aron makuha ug ibutang ang basket sa estante; Usa ka himan sa pagkolekta gipahimutang tali sa shuttle nga sakyanan ug sa tul-id nga track, nga konektado sa electrified wire nga gihan-ay sulod sa tul-id nga track ug gigamit sa pagsuplay og kuryente alang sa shuttle nga sakyanan. Ang istruktura nga bahin sa clip sa intelihenteng shuttle nga awto alang sa pagtipig usab nahimutang sa mga grooves nga gipahimutang sa mga posisyon diin ang ligid sa pagmaneho ug ang passive nga ligid matag usa nagkontak sa nagdugtong nga baras, ug usa ka elastic retainer singsing ang gibutang sa lihok aron maporma ang axial. pagpahiluna sa ligid sa pagmaneho ug sa passive wheel. Ang dobleng giya nga mga ligid gipahimutang sa kilid sa shuttle chassis ubos sa driving wheel ug sa passive wheel, ug tali sa tul-id nga track ug sa shuttle chassis. Ang mga ligid nga doble nga giya nagporma sa wala ug tuo nga mga limitasyon kung ang ligid sa pagmaneho ug ang passive nga ligid nagdagan sa tul-id nga track. Ang mekanismo sa sekundaryong pagpalapad sa fork naglakip sa: ang una nga lebel sa fork extension push plate, ang ikaduha nga lebel sa fork extension plate, ang ikaduha nga lebel nga synchronous pulley nga mekanismo, ang ikaduhang lebel sa fork extension drive nga mekanismo, ang fork extension drive motor, laing reducer, ug ang drive shaft ; Ang gawas nga bahin sa hub bracket sa shuttle car frame gihatag sa usa ka una nga yugto sa fork extension push plate; Usa ka U-shaped chute gihan-ay sa tunga-tunga sa unang stage fork pushing plate, ug daghang U-shaped chute pulleys ang gihan-ay sa patas nga agwat sa U-shaped chute; Ang ikaduha nga fork plate gihan-ay sa gawas sa U-shaped chute; Ang secondary fork plate konektado sa daghang U-shaped groove pulleys pinaagi sa bolts ug nuts; Ang mga tumoy nga tumoy sa ikaduha nga yugto sa fork extension plate gihatagan matag usa sa usa ka shift fork, usa ka DC planetary reducer motor ug usa ka photoelectric sensor gikan sa gawas ngadto sa sulod; Ang photoelectric sensor gigamit aron makuha ang signal sa posisyon sa fork ug ipadala kini sa main control board sa mekanismo sa extension sa fork, nga nagkontrol sa DC planetary reducer motor aron mamaneho ang tinidor aron molihok nga pahalang o patindog; Ang usa ka sekundaryong kasabay nga mekanismo sa pulley gihikay sa panguna nga fork pushing plate ug direkta sa ubos ug sa ibabaw sa U-shaped chute; Ang secondary synchronous pulley nga mekanismo konektado sa synchronous belt pressing plate sa secondary fork extension plate; Ang fork extension drive nga motor ug laing reducer nagmaneho sa secondary fork extension drive nga mekanismo sa paglihok, ug nagmaneho sa secondary fork extension drive nga mekanismo sa pikas kilid aron sa paglihok pinaagi sa drive shaft, aron ang panguna nga fork extension push plate molihok ug magmaneho sa ikaduha. dungan nga pulley mekanismo sa paglihok, sa ingon nagmaneho sa ikaduha nga fork extension plate sa paglihok. Ang two-stage fork extension transmission mechanism naglangkob sa magnetic encoder, usa ka synchronous belt pulley I, usa ka synchronous belt I, usa ka tensioning wheel device ug usa ka rack; Usa ka timing belt pulley 1 ug usa ka timing belt 1 gihan-ay ubos sa unang yugto nga fork pushing plate; Ang usa ka kilid sa synchronous belt pulley I konektado sa transmission shaft, ug ang pikas kilid konektado sa output shaft sa laing reducer pinaagi sa keyway. Tensioner ligid mga himan sa tinagsa gibutang sa duha ka kilid sa uban nga mga reducer alang sa auxiliary fixation sa synchronous belt pulley I ug ang synchronous bakus I; Ang usa ka rack gihan-ay tali sa unang yugto nga fork pushing plate ug ang synchronous belt; Ang fork extension drive motor ug laing reducer nagmaneho sa synchronous belt pulley I ug ang synchronous belt I aron i-rotate, ug i-drive ang synchronous belt pulley II ug ang synchronous belt II sa pikas kilid aron mag-rotate pinaagi sa transmission shaft. Sa parehas nga oras, ang mga rack sa duha ka kilid nagmaneho sa katugbang nga panguna nga fork extension push plate aron makab-ot ang panguna nga extension sa tinidor. Sa diha nga ang ikaduha nga synchronous belt pulley mekanismo nagalihok synchronously ug nagmaneho sa secondary fork extension plate sa paglihok, ang U-shaped pulley rolls sa U-shaped chute, Himoa ang secondary fork extension plate makaamgo sa secondary fork extension. Ang tensioning wheel device naglakip sa: bolt, adjusting bracket, double nut ug tensioning wheel; Ang usa ka tensioning wheel gihan-ay sa ubos sa synchronous belt I ug sa duha ka kilid sa laing reducer, ug gitakda sa main body bracket pinaagi sa double nut; Ang usa ka adjusting bracket gihan-ay ubos sa double nut pinaagi sa bolt, ug ang posisyon sa adjusting bracket gi-adjust sa bolt, aron ang adjusting bracket magduso sa double nut sa paglihok pataas ug paubos, aron ang synchronous belt mapadayon nako ang tension state ubos sa aksyon sa tensioning wheel.
Sa unsa nga paagi nga ang HEGERLS shuttle bus magmaneho sa mga benepisyo sa negosyo?
Una, ang mekanismo sa pagbiyahe, mekanismo sa fork extension ug frame, sliding contact line ug power collection device sa HEGERLS intelihenteng shuttle nga sakyanan nga adunay clip sa storage kay makatarunganon nga gihan-ay, nga naghimo sa bug-os nga paggamit sa luna sa shuttle nga sakyanan, ug makapahiangay sa awtomatik nga pagtipig ug pagbawi sa mga butang nga lainlain nga mga detalye ug lokasyon sa tulo-ka-dimensyon nga bodega, pagpalapad sa aplikasyon sa pagsakup sa shuttle nga awto, ug dali ug epektibo nga makompleto ang usa ka serye sa padayon nga mga aksyon sa shuttle nga awto, sama sa paglakaw, pagpalapad sa tinidor, pagpili. pataas ug pagbutang sa mga butang, Kini nakaamgo sa paspas ug tukma nga pagtipig sa mga butang, sa ingon nagpauswag sa kahusayan sa operasyon ug lebel sa teknolohiya sa automation sa automated nga bodega, ug pagkunhod sa gasto sa pamuhunan sa mga negosyo. Sa parehas nga oras, kini yano ug gaan sa istruktura, taas nga kasaligan, ug dali nga mapadayon. Mahimong mapulihan niini ang tradisyonal nga stacker sa dalan, nahibal-an ang pagka-flexible sa sistema, ug nahiuyon sa us aka us aka us aka us aka us aka us aka us aka e-commerce logistics ug automation sa warehousing.
Ikaduha, sa mekanismo sa pagbiyahe sa HEGERLS nga intelihente nga shuttle nga awto, ang mga nagdugtong nga shaft sa mga ligid sa pagmaneho ug passive nga mga ligid gihatagan mga grooves, ug ang mga nagdugtong nga bahin sa mga bearings konektado sa usa ka bag-ong tipo sa elastic retainer ring, nga nakaamgo sa epekto sa pag-posisyon sa axial sa pagkonekta. mga shaft; Pinaagi sa paggamit sa pagkamaunat-unat retainer singsing aron makab-ot ang axial positioning epekto, ang produksyon efficiency mahimong madugangan ug ang gasto mahimong maluwas.
Ikatulo: Ang Higelis HEGERLS nga intelihente nga shuttle nga awto alang sa pagtipig sa pagtipig nakaamgo nga ang ligid sa pagmaneho ug ang passive nga ligid kanunay nga molihok sa tul-id nga agianan nga dili motipas gikan sa track pinaagi sa istruktura sa ligid nga doble nga giya. Kini nga istruktura sa pagposisyon mas lig-on ug kasaligan.
Ikaupat, ang sekondaryang fork extension structure nga gisagop sa HEGERLS intelihenteng shuttle nga sakyanan makahimo sa fork extension nga distansya nga mas layo ug makakuha og dugang nga mga basket sa lain-laing mga posisyon; Sa samang higayon, ang prinsipyo sa ikaduhang mekanismo sa pagpalapad sa tinidor yano, ug ang gasto sa disenyo ug paghimo ubos; Ang bahin sa transmission nagsagop sa mode sa usa ka motor + reducer + transmission shaft aron mahimo ang mekanismo sa pagpalapad sa sekondarya nga tinidor nga makab-ot ang katuyoan sa dungan nga pagpalapad ug pagkunhod, nga makatipig daghang gasto, epektibo nga makunhuran ang gikinahanglan nga wanang sa layout, ug makunhuran ang gibug-aton sa shuttle nga awto. .
Ikalima, ang Higelis HEGERLS nga intelihente nga shuttle nga sakyanan nagsagop sa usa ka bag-ong matang sa tensioning wheel device, nga dali nga makapugong sa synchronous belt nga tensioned ug makaamgo sa normal nga trabaho sa shuttle nga sakyanan. Dugang pa, kini nga tensioning wheel device yano nga himoon, sayon sa pag-instalar ug mahimong dali nga ma-adjust, nga makadaginot sa gasto, makadaginot sa luna ug makapauswag sa kaepektibo sa trabaho.
Oras sa pag-post: Dis-19-2022